Mục tiêu
-
Ứng dụng cảm biến dò đường để Rover tự động đi theo line
Viết chương trình
-
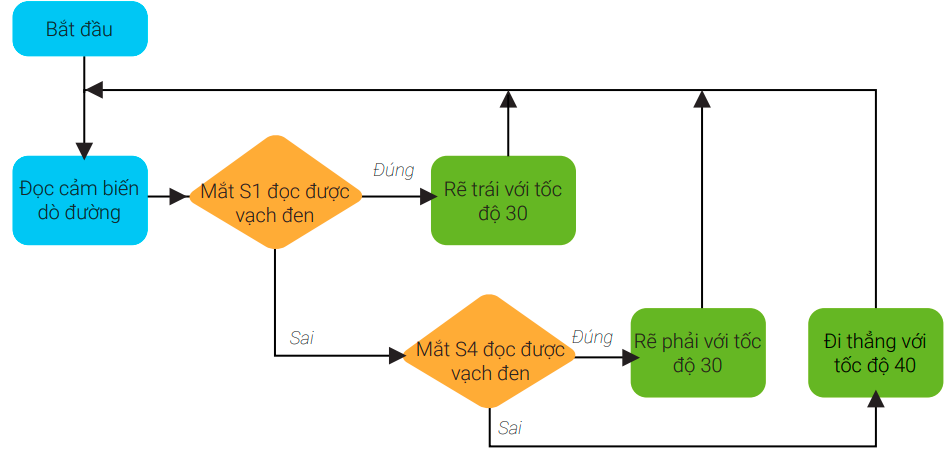
Rover sẽ chạy theo vạch đen trên bản đồ nhờ 4 mắt đọc, cơ chế hoạt động sẽ như sau:
-
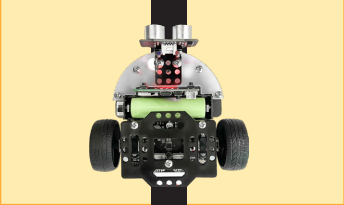
- Đi thẳng: S1 và S4 không đọc được vạch đen
-
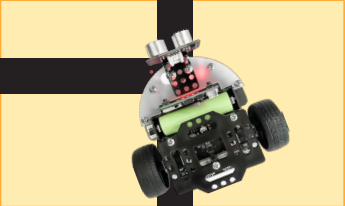
Rẽ trái: S1 đọc được vạch đen, S4 thì không
-
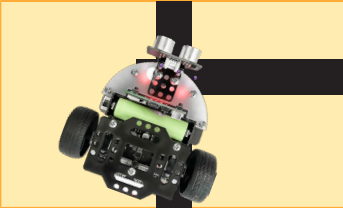
Rẽ phải: S4 đọc được vạch đen, S1 thì không
-
-
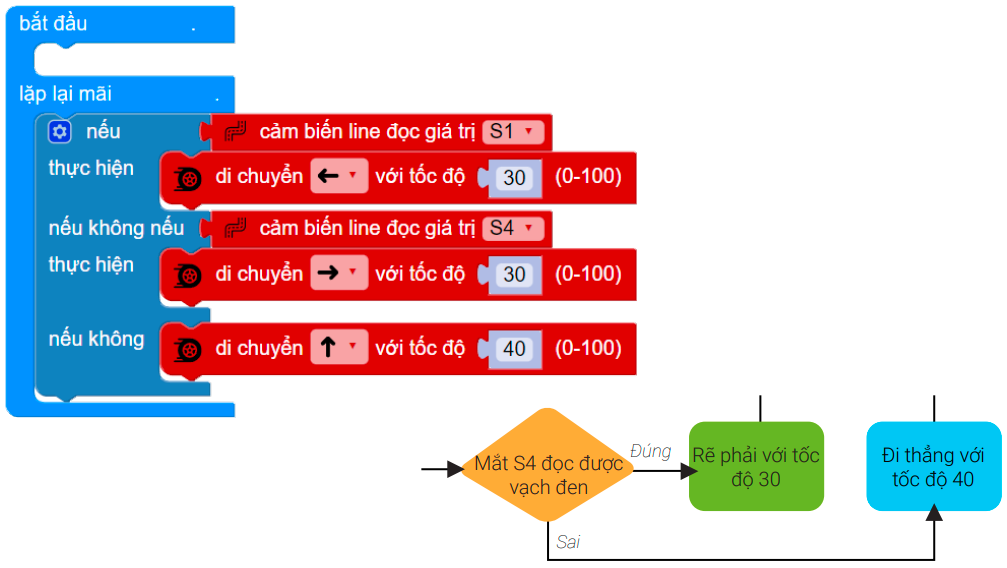
Viết thuật toán
-
Viết chương trình: Tạo điều kiện thứ nhất, nếu mắt S1 đọc được vạch đen thì rẽ trái

-
Tạo điều kiện tiếp theo, nếu mắt S4 đọc được vạch đen thì rẽ phải. Nếu cả 2 điều kiện không đúng, đi thẳng